We are releasing a patch fixing some of the issues of 0.8.3
Regressions fixed
Thanks to @minhaoxu1995 for catching something very obvious we missed, the new Mustang model did not have the collisions enabled, therefore wasn’t measuring any collision. We fixed this and also made sure that no other vehicle has this issue.
We have also put more effort into making bikes and motorbikes more stable, but we are aware that they still cause issues when running long episodes, so we added a method to disable two-wheeled vehicles altogether. This can be done by adding the following to your “CarlaSettings.ini”
[CARLA/LevelSettings]
; Disable bikes and motorbikes, if true only four-wheeled
; vehicles will be spawned.
DisableTwoWheeledVehicles=true
Community contribution: ROS bridge
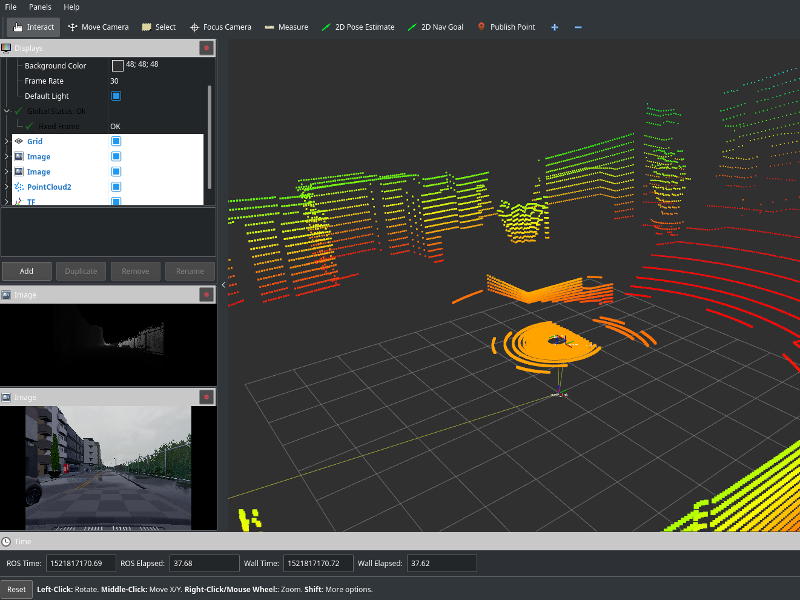
Thanks to George Laurent now we have ROS (Robot Operating System) support!
It supports our current camera types (depth, semantic, and RGB), Lidar, and bounding boxes. You can find more information in the ROS Bridge folder in our main repository.
New vehicle model
Finally, since we are making a new release, we took the chance to add the latest model in our car collection, a Tesla Model 3!
Full list of changes
- Community contribution: ROS bridge by George Laurent.
- New vehicle: Tesla Model 3.
- Added an option to “CarlaSettings.ini” to disable bikes and motorbikes.
- Fixed missing collision of vehicles introduced in 0.8.3.
- Improved stability of bikes and motorbikes.
- Improved autopilot turning behaviour at intersections, now using front wheels positions as reference.
- Temporarily removed the Kawasaki Ninja because the model was having some stability issues.