Jekyll2024-07-02T18:24:58+00:00http://carla.org//feed.xmlCARLA SimulatorOpen-source simulator for autonomous driving research.CARLA TeamCARLA CVPR Autonomous Grand Challenge winners announced!2024-06-10T00:00:00+00:002024-06-10T00:00:00+00:00http://carla.org//2024/06/10/cvpr-winndersCARLA CVPR Autonomous Grand Challenge winners
We are delighted to announce the winners of the CARLA CVPR Autonomous Grand Challenge 2024!!
The Honorable Runner-up prize is awarded to the Tuebingen AI team, who placed first in the MAP track of the CARLA Leaderboard 2.0 and achieved second place in the SENSORS track.
The Outstanding Champion award goes to LLM4AD, who achieved an impressive score of 6.9 in the SENSORS track of the Leaderboard 2.0, 23% ahead of the nearest competitor while also placing second in the MAP track.
Additionally, LLM4AD are awarded the Innovation Award, for their innovation in using LLaVa and LLaMA in concert to generate waypoints and select challenging scenarios to focus training efficiently.
Congratulations to the winners and to all the competitors who submitted excellent work. For more details about the CVPR Autonomous Grand Challenge visit the website
Thank you all for participating! We hope to see many of you at the workshop.
]]>@MattRoweEAIFCARLA teams up with Neya Systems to upgrade to Unreal Engine 52024-03-26T00:00:00+00:002024-03-26T00:00:00+00:00http://carla.org//2024/03/26/neya-collaboration
We are thrilled to announce today our collaboration with Neya Systems and its parent company Applied Research Associates (ARA), in which the CARLA team and Neya Systems are working together to upgrade the CARLA simulator to Unreal Engine 5. The long awaited upgrade is motivated by ARA’s requirements in developing a Virtual Testbed for DARPA’s Triage Challenge. The DARPA Triage Challenge involves a series of competitive events aimed at promoting innovation for medical triage. Neya Systems leverages the CARLA framework for stress testing the autonomy and control of its off-road vehicles in a virtual environment before moving to field tests.
“CARLA’s advanced features and flexibility align perfectly with our commitment to pushing the boundaries of innovation in the field of autonomy,” said Kurt Bruck, division manager, Neya Systems. “In addition, CARLA’s capability to simulate off-road environments allows us to explore and develop autonomous solutions that go beyond conventional paved road scenarios. Updating CARLA to Unreal Engine 5 will be a significant accomplishment for open-source simulation developers everywhere.”
What does this mean for CARLA?
Unreal Engine 5 brings a comprehensive suite of upgrades that promise to dramatically improve modeling, simulation realism and performance in CARLA. First and foremost, Unreal Engine 5 looks incredible! If you haven’t already, check out the teaser video above. More specifically, Unreal Engine 5 brings a number of important innovations that promise to supercharge your autonomy simulations:
Nanite
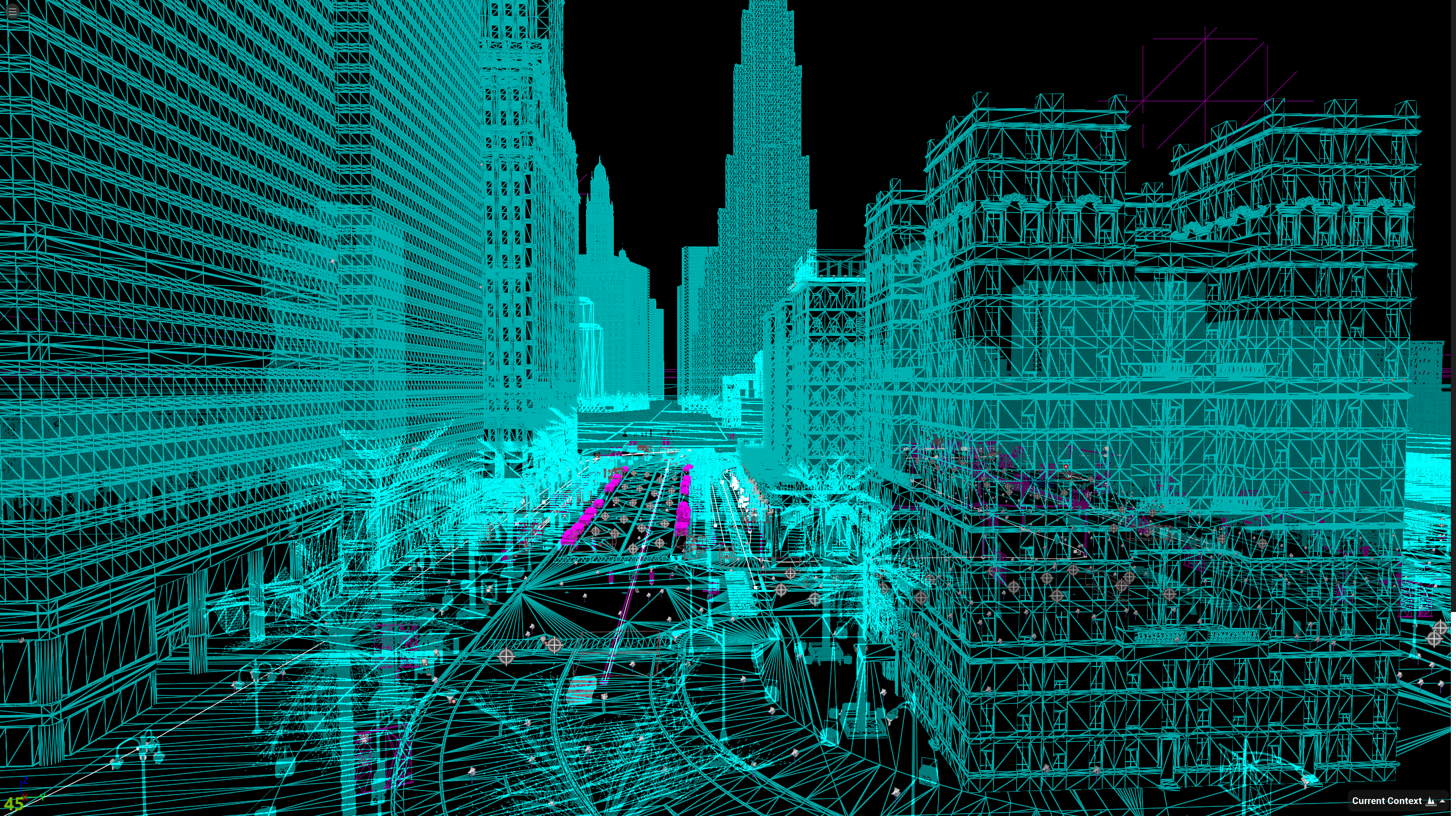
Nanite is the new virtualized geometry system at the core of Unreal Engine 5. It allows an unprecedented level of geometry detail and high object counts without compromising performance. Meshes can be used with a far higher level of geometric detail while still achieving real-time performance due to Nanite’s intelligent geometry management. Nanite only works on the level of detail that can be perceived, distant objects in the scene are rendered using less polygons while Nanite continuously adjusts the number of polygons used for an object as its distance from the camera changes. Level Of Detail meshes (LODs) are no longer needed, eliminating the artefacts associated with LODs and reducing modelling time.
Lumen
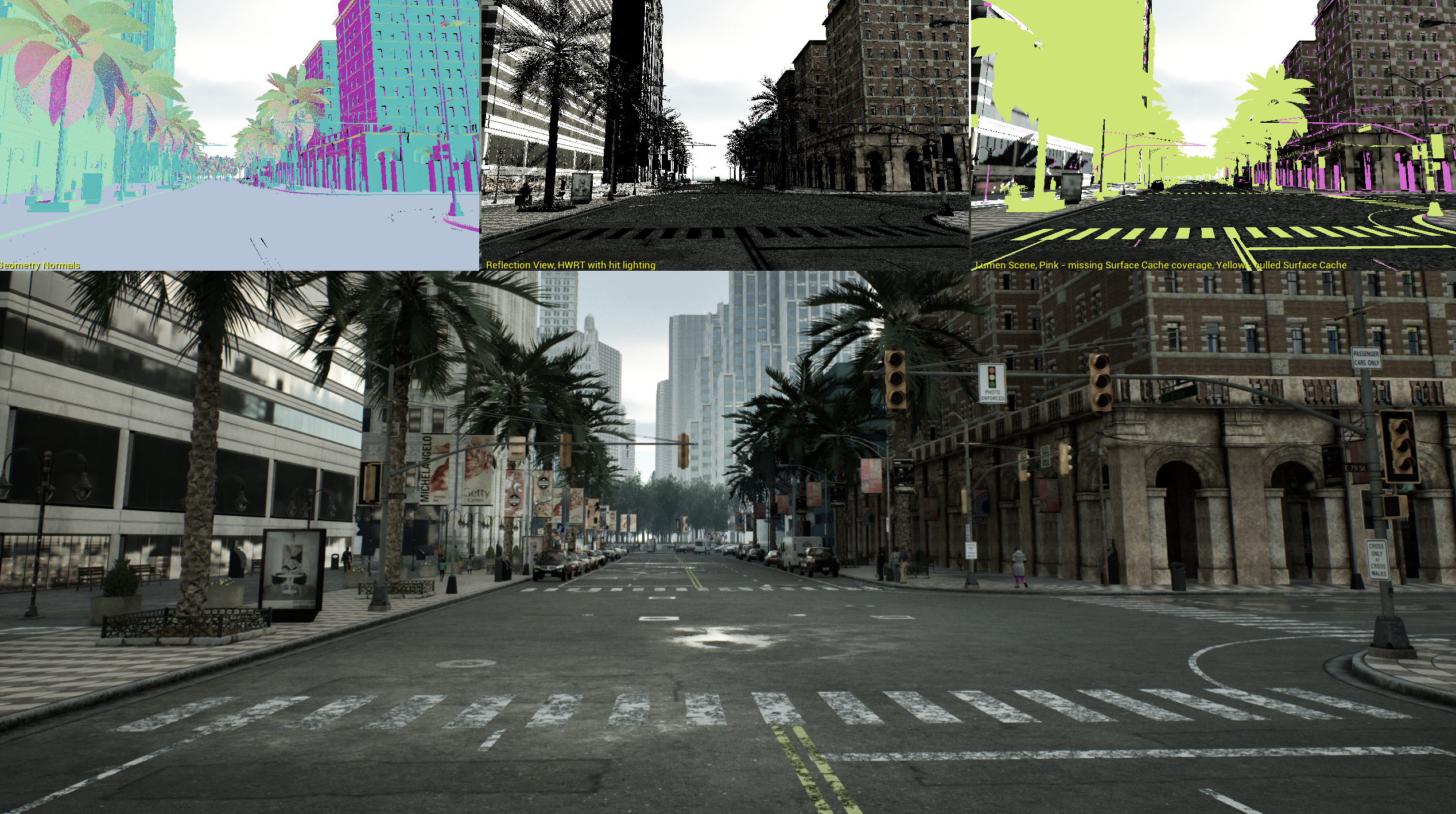
Lumen is Unreal Engine 5’s new global illumination and reflections system that improves the appearance of indirectly illuminated objects. In a real world scene, a lot of the light illuminating an object comes not from a direct light source like the sun or a streetlamp, but from light diffusely reflected from other objects. The objects that reflect the light affect its qualities, such as color and intensity. Lumen models these indirect lighting effects and reflections with stunning realism!
Metahumans
The upgrade to Unreal Engine 5 opens up the possibility to bring MetaHumans into CARLA! MetaHumans is a technology framework that facilitates modeling and animation of hyper-realistic human characters in video games. Alongside the improved rendering of skin, clothes and hair come a suite of tools to help you create MetaHumans efficiently in UE5. The MetaHumans framework provides UIs for modeling and animating hyper-realistic depictions of humans. This has big implications for robotic applications of CARLA involving facial recognition, such as security drones or search and rescue applications.
Coming soon!
The collaboration plans to release an initial update to CARLA in the summer of 2024, with additional updates to CARLA’s physics capabilities to follow in 2025. Stay tuned here and on LinkedIn for future updates!
About Neya Systems
Neya Systems, a division of Applied Research Associates, is committed to advancing the field of unmanned systems through the development and integration of cutting-edge technologies and expertise in autonomy, computer vision, cybersecurity, and general unmanned systems development and deployment. Our team of experts is dedicated to creating innovative solutions that help our customers meet their mission goals.
About ARA
Applied Research Associates, Inc. (ARA) was founded in 1979, in Albuquerque, New Mexico, to offer science and engineering research to solve problems of national importance. ARA delivers leading-edge products and innovative solutions for national defense, energy, homeland security, aerospace, healthcare, transportation, and manufacturing. With over 2,000 employee-owners at locations in the U.S. and Canada, ARA offers a broad range of technical expertise in defense technologies, civil engineering, computer software and simulation, systems analysis, biomedical engineering, environmental technologies, and blast testing and measurement.
In the fast-paced world of autonomous vehicle (AV) development, the CARLA Autonomous Driving Simulator has quickly become a go-to resource for developers and researchers alike. Why? Because it focuses on providing easy-to-use APIs, integration with other technologies, and is highly customizable. These features make CARLA an essential tool for anyone pushing the boundaries of AV tech. We are expanding these capabilities with the NVIDIA Omniverse Cloud APIs announced today at NVIDIA GTC, a global AI conference.
Why CARLA Rocks for Developers
First off, CARLA is user-friendly. You don’t need to spend days trying to figure out how to make it work; it’s designed to get you up and running quickly. It’s also flexible - whatever your project, chances are, CARLA can adapt to fit its needs. Want to tweak scenarios or hook it up with external software? CARLA can do it.
Speeding Up the AV Game
Where CARLA shines is in helping developers through the entire AV development cycle. Whether it’s optimizing where to place sensors on your vehicle, designing the brains of the operation (aka perception and planning algorithms), or making sure the whole system can handle real-life scenarios, CARLA is there to make the journey smoother and faster. By simulating real-world conditions in a virtual environment, developers can iterate and refine their tech without the constant need for costly and time-consuming real-world tests.
The Sensor Simulation Superpower
A big part of what makes CARLA so valuable is its ability to mimic the sensors that AVs rely on. With a rich set of models for cameras, LIDAR, RADAR, and IMUs right out of the box, developers have a solid foundation for building systems that can navigate the complexities of real roads. This sensor simulation is key for developing algorithms that can accurately understand and respond to dynamic driving conditions.
Leveling Up with NVIDIA Omniverse Cloud APIs
As the AV field grows, so does the need for more sophisticated sensor models. Enter NVIDIA Omniverse Cloud APIs, which open up new possibilities for making CARLA simulations even more realistic. These new APIs allow for the integration of cutting-edge sensors into the CARLA simulator, enhancing the accuracy of simulations and narrowing the gap between the virtual and real worlds.
A Community Effort
The beauty of CARLA’s evolution is how it’s become a community affair. With Omniverse Cloud APIs, third-party developers can now add their sensor models to the mix, enriching the CARLA ecosystem. This collaborative approach not only speeds up innovation but also empowers everyone involved to contribute to the advancement of AV technology.
With NVIDIA Omniverse Cloud APIs, CARLA has become more than just a simulator; it’s also a powerhouse for accelerating AV development. It’s about making the development process more efficient, reducing the reliance on physical prototypes, and, ultimately, crafting the future of autonomous driving. As CARLA continues to evolve, it’s set to remain at the heart of the AV development community, driving innovation and collaboration.
]]>@MattRoweEAIFOASIS Sim from Synkrotron2023-12-12T00:00:00+00:002023-12-12T00:00:00+00:00http://carla.org//2023/12/12/synkrotron-oasis
Ever wanted to set up complex CARLA simulations and scenarios without writing a line of code? - This is the power of Synkrotron’s OASIS Simulation Platform.
OASIS Sim facilitates the development and execution of complex scenarios through an intuitive, web-based, graphical user interface. The vast configurability of the CARLA simulator is exposed through OASIS Sim’s multiple views for Scenario Authoring, Vehicle Configuration, Diagnosis and Cloud Job Management. The simulation workload can be distributed and parallelised on the cloud, leveraging the power of distributed cloud computing such as Amazon Web Services with the latest GPU technology. In the following, we introduce you to OASIS Sim’s principal views to explain how they can help you set up and run your simulations! Please visit the Synkrotron website and request a trial.
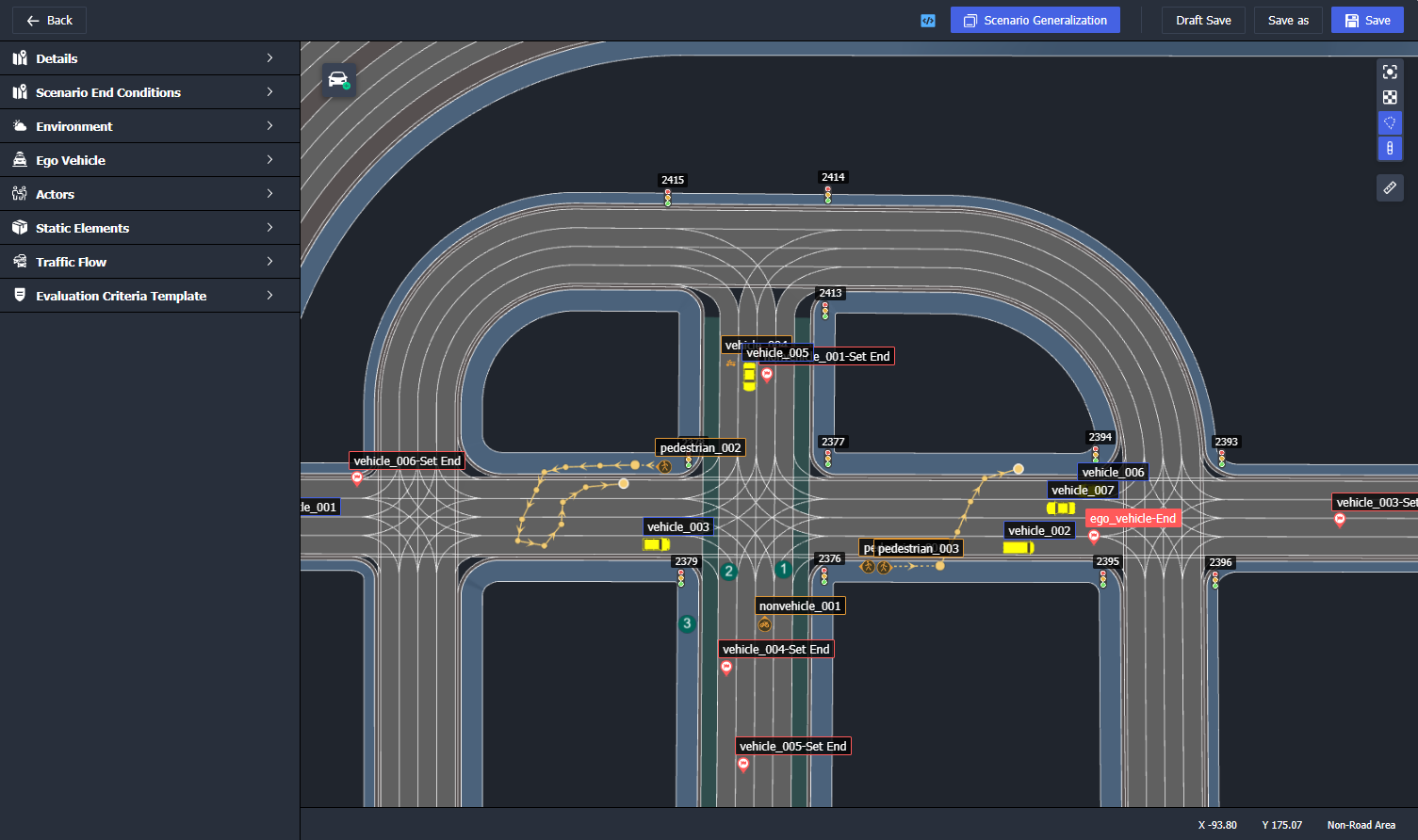
Visual scenario authoring
OASIS Sim provides a Scenario Editor GUI that enables users to design and edit traffic scenarios visually and intuitively. Users can specify the environment condition, the driving task of the ego vehicle and the behaviors of other traffic participants. The definition of these elements is compatible with OpenScenario 1.0 and can be imported from external sources or exported. Background traffic can also be managed in this view to add diversity and complexity to each scenario.
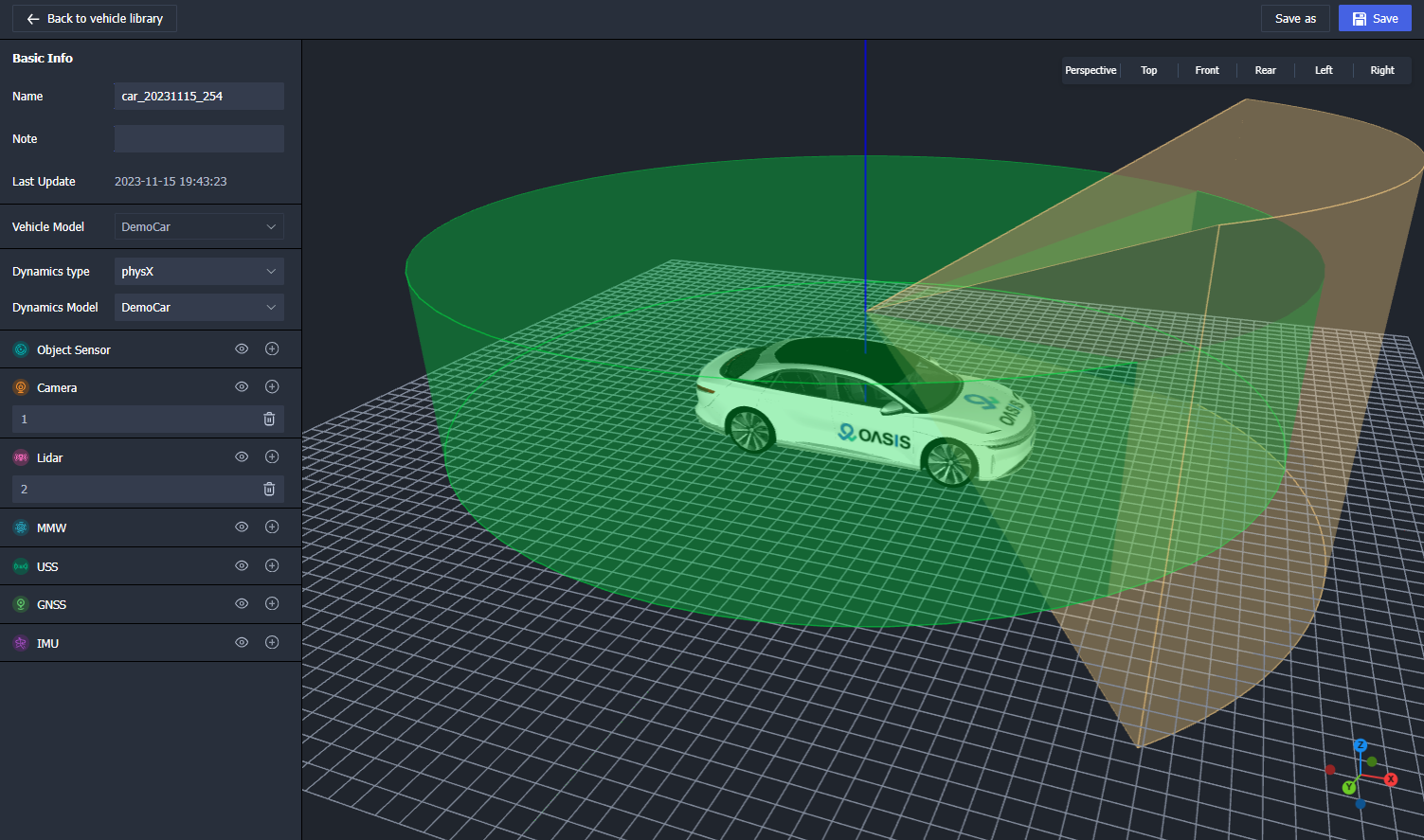
Sensor and vehicle configuration
In the Vehicle Configuration panel users can equip the ego vehicle with pre-defined sensor types, a vehicle dynamics model and an autonomous driving system. This view offers visualizations of sensor placement and fields of view, allowing comprehensive configuration of the sensor suite and behaviors of the ego vehicle.
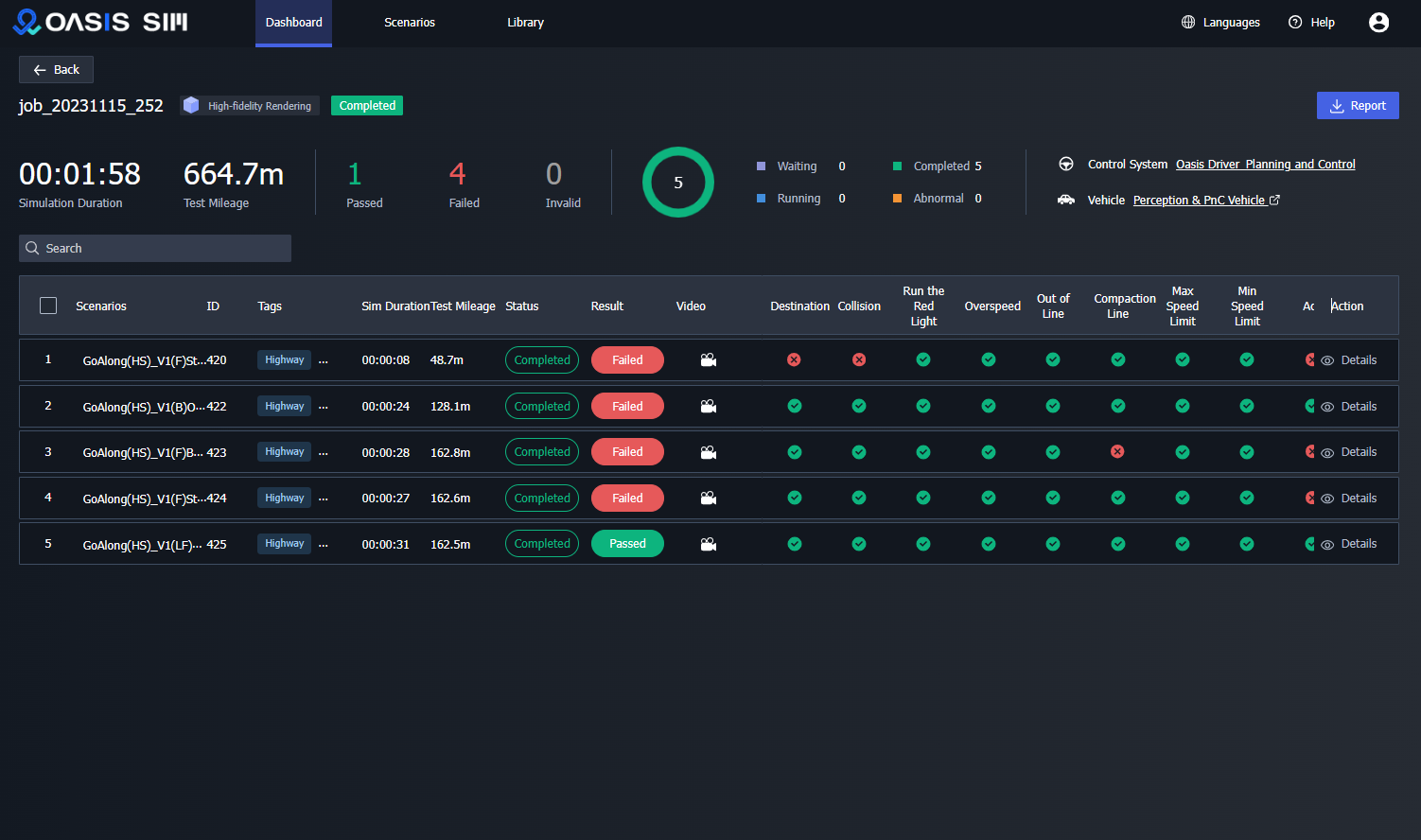
Cloud based job management
OASIS Sim works on the cloud, leveraging the scalability of cloud computing and the latest GPU technology to accelerate your simulation workflow. Each simulation is managed as a cloud processing job in the task management view. For each job you can see progress status and key outcome indicators such as collisions or traffic infractions. Multiple jobs will be parallelised using cloud computing resources to accelerate the R&D workflow.
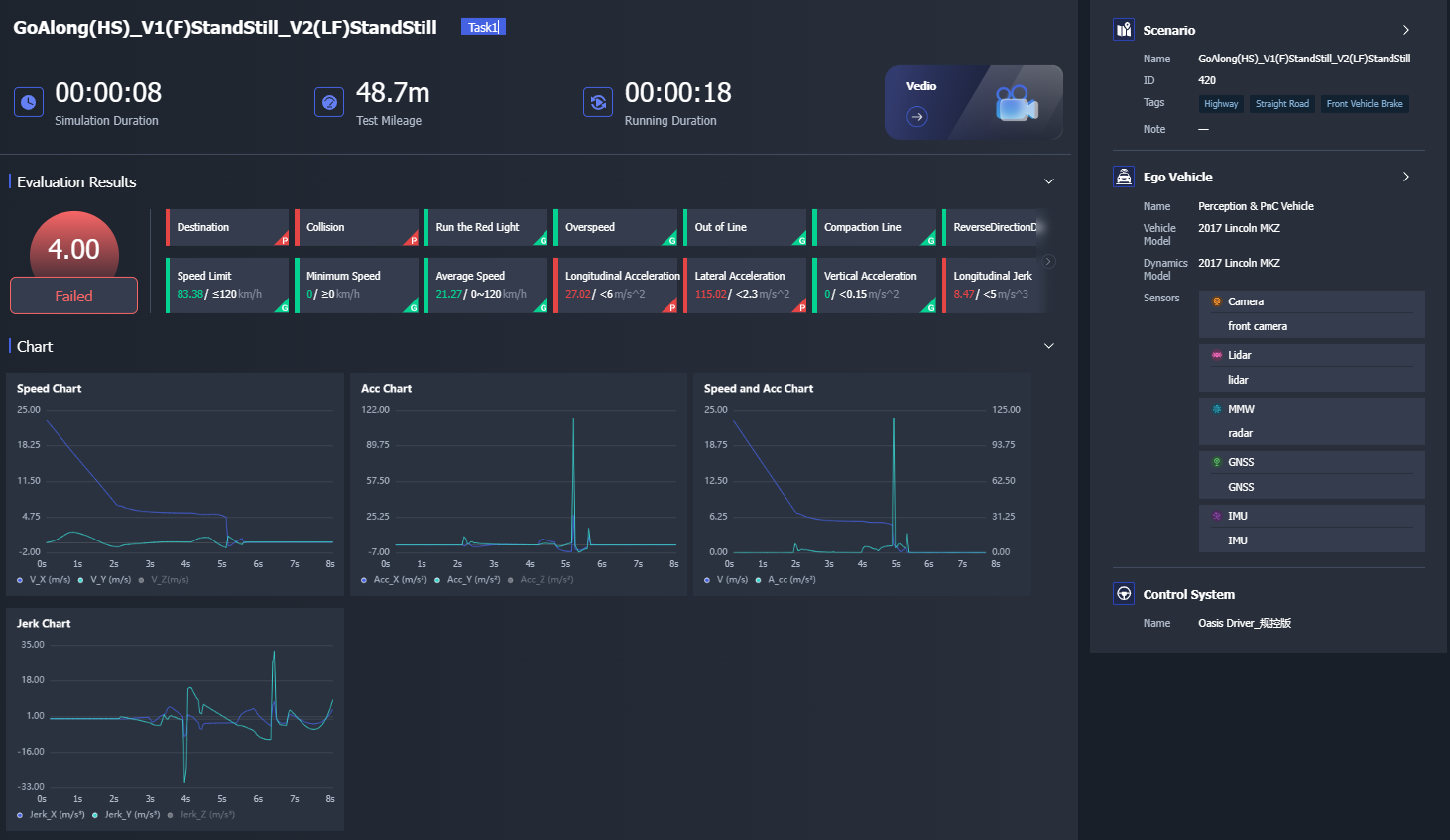
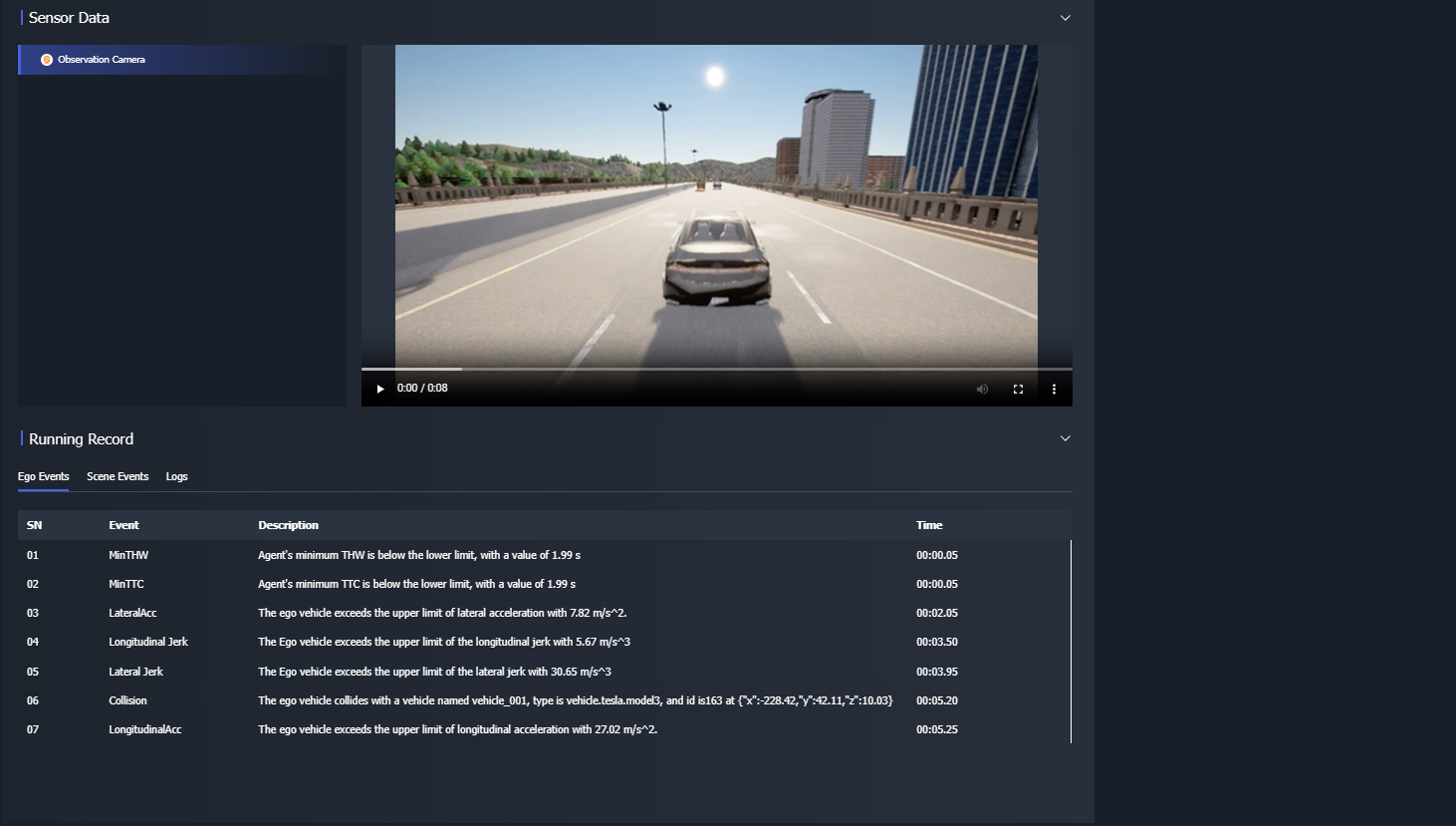
Diagnosis
Completed simulations can be analyzed in detail through the Diagnosis view to scrutinize the performance of an autonomous driving system under test both visually and through log data. Sensor feeds such as cameras and LIDAR can be replayed directly, performance logs can be viewed and downloaded and telemetry details such as speed, acceleration and inertial motion can be viewed graphically. The Diagnosis view gives you everything you need to troubleshoot your system through detailed metrics and visual analysis.
Deployment and integration
Both cloud and local deployments of Oasis Sim are available through containers. A comprehensive API exposes OASIS Sim’s features for seamless DevOps integration in your R&D workflow. Please visit the Synkrotron website and request a trial.
This is the first of a series of articles covering different tools within the CARLA Ecosystem. CARLA provides integration with numerous tools from the community, partners and sponsors to augment its capabilities and address a wide array of simulation use cases.
We are pleased to present to you the latest version of CARLA, version 0.9.15! This version brings SimReady content import to CARLA through NVIDIA’s Omniverse platform, 2 new maps, a procedural map generation tool and a procedural building generation tool to accelerate and enhance your CARLA content creation process.
CARLA is now integrated with NVIDIA’s Omniverse content creation platform to support SimReady content import into CARLA with just a few clicks. CARLA users can now import assets directly into CARLA through the NVIDIA Omniverse Unreal Engine plugin.
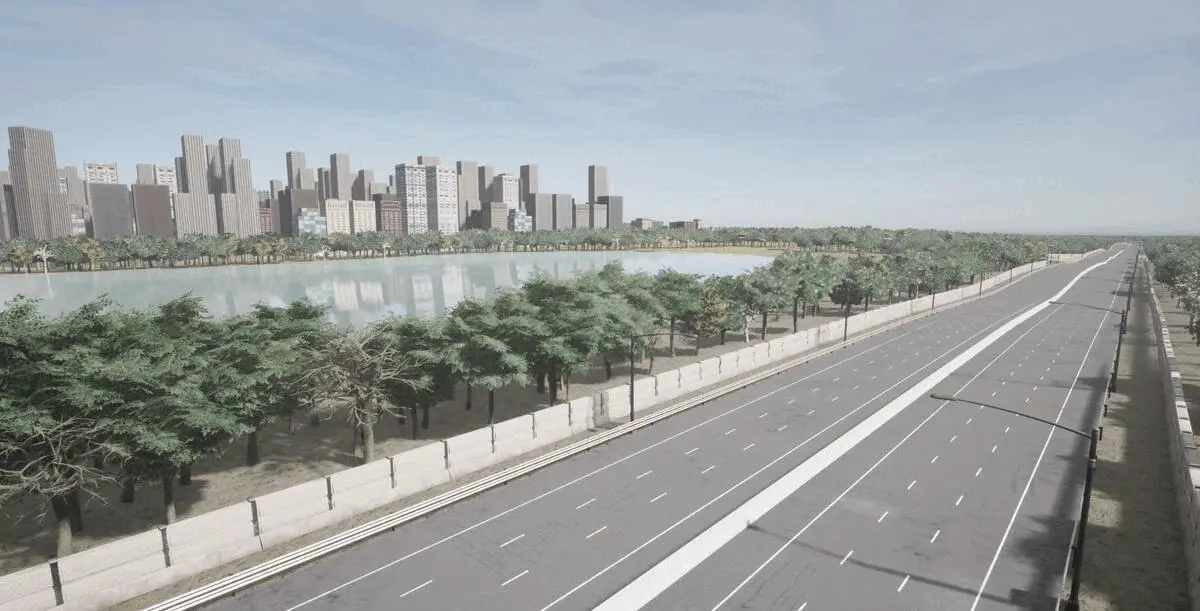
0.9.15 introduces two new maps: Town 13, a new Large Map of 10x10 km2 and Town 15, a new map based on the campus of the Universitat Autònoma de Barcelona (UAB). Town 13 shares its scale and some of its features with Town 12. However, the styles of many of its details such as road surfaces, buildings and vegetation are very distinct from those of Town 12. Therefore Town 13 serves as an ideal companion to Town 12, completing a powerful train-validation pair to expose overfitting issues! Town 15 sports a campus-like road layout, with plentiful mini-roundabouts and traffic calming measures, along with minimalist modern buildings like those seen in many European universities.
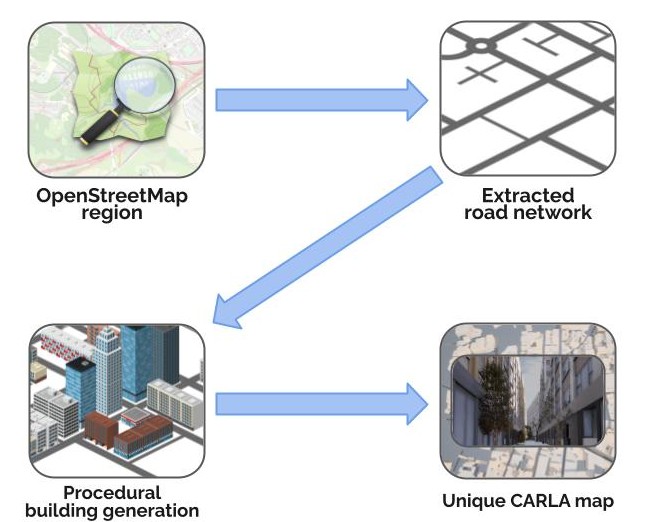
This release introduces some incredible new procedural map generation tools to accelerate your environment generation workflow. The Digital Twin Tool enables a 3D map to be procedurally generated from a digital representation of real-world road networks derived from OpenStreetMap data, fully populated with roads, buildings and vegetation. The procedural building tool can be used for creating 3D models based on a selection of fascia building blocks and tweekable parameters, to create infinite variations on building styles.
A new heavy goods vehicle is now included to add diversity to CARLA’s vehicle library. The vehicle is the tractor part of an HGV in the cab-over-engine style seen primarily on European roads.
CARLA’s asset library now has a catalogue to help you find the assets you require for your simulation. Browse blueprints with pictures and choose your props and vehicles with ease!
We hope you enjoy using CARLA’s latest features!
SimReady content from NVIDIA’s Omniverse platform
NVIDIA’s SimReady specification supports the preparation of 3D content that is purpose-built for simulation to help streamline content creation pipelines used in simulating 3D virtual environments for machine learning purposes in robotics and autonomous driving. Through the Omniverse Unreal Engine plugin, now integrated into CARLA, users can import, in just a few clicks, SimReady content such as vehicles already configured with working lights, doors and wheels and props ready for use instantaneously to decorate CARLA maps. CARLA’s Omniverse integration boasts to significantly accelerate your 3D environment building pipeline and opens the door to a whole world of applications in the Omniverse ecosystem.
Town 13
Town 13 shares many similarities with Town 12. It is 100 square kilometers in size and has an extensive road network, a high-rise downtown area, residential and rural areas, vegetation and water features. However, Town 13’s road network has some unique details that differ from those of Town 12. To add to this, the architectural styles of each area of the city are quite distinct from the corresponding areas of Town 12. Town 13 is also decorated with new styles of vegetation and foliage. This makes Town 13 an ideal companion to Town 12 as part of a train-validation pair. Deriving training data using one of the pair and then running validation in the other is a powerful method for exposing overfitting issues in your AD stack.
Town 15
Town 15 is a standard map based on the road layout and some emblematic buildings from the Universitat Autònoma de Barcelona (UAB) campus. The road layout includes many roundabouts and roadside parking spots and also has some areas of steep elevation. The map also features numerous minimalist, modern buildings styled after those of the campus of the Universitat Autònoma de Barcelona, including the Computer Vision Center and the humanities library. This is an ideal map to train and test in environments similar to campuses or industrial estates, with slow moving traffic and traffic calming measures.
Procedural Map Generation Tools
CARLA 0.9.15 introduces two new experimental features for procedural generation of new maps and buildings. These tools will help to accelerate map generation and add diversity to custom built CARLA maps.
Digital Twin Tool
The digital twin tool generates unique CARLA maps based on areas of road network derived from OpenStreetMap data. Users can download an area of OSM data as input for the tool and browse the map using the tool’s interface. When an area of interest is chosen, the tool will extract the roads then decorate them with realistic road surfaces, generating 3D buildings and vegetation to fill the spaces between the roads. The result is a unique CARLA map with a road network representing a digital twin of a real-world road network. The buildings are generated matching the footprint and height data extracted from OSM, so the buildings in the digital twin proportionally match the real buildings in the chosen map region. Buildings are clad with mesh pieces in a variety of styles drawn from the CARLA asset library to create visual diversity.
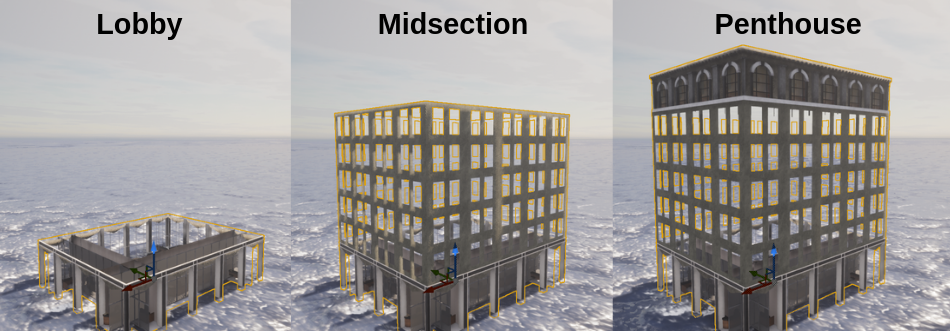
Procedural building tool
The procedural building tool gives CARLA users the capability to create new buildings based on a library of building block mesh pieces and parameters to control the dimensions and features of the building.
Various decorations can be added to the buildings such as window boxes, lintels, windowsills, guttering, sun shades, blinds and antennas to create subtle or large variations.
New vehicle: Heavy Goods Vehicle
CARLA’s array of vehicles for simulation has grown with the addition of a Cab-Over-Engine style heavy goods vehicle tractor, of the style commonly used throughout Europe for commercial transportation.
CARLA catalogue
CARLA’s principal assets - maps, vehicles, pedestrians and props now have a catalogue to help find the item that best suits your needs. Browse visually through maps, vehicles or props to find the assets you want to use in your simulation and copy the Blueprint ID right out of the catalogue. Check the CARLA catalogue out here. The catalogue also includes useful navigator tools for Towns 12 and 13, which can help you make your way around these two Large Maps with ease.
Other fixes and improvements:
New API function to load map only if it is not the current map
Added empty actor blueprint
Pedestrians with AI or in replayer are now faster around 10x. They have collisions disabled until they hit a vehicle
Fixed bug causing the FPixelReader::SavePixelsToDisk(PixelData, FilePath) function to crash due to pixel array not set correctly
Fixed the import script, where could use any other TilesInfo.txt if the destination folder has many
Fixed sensors to check for the stream to be ready (race condition)
Added keyword arguments for carla.TrafficManager Python API functions
Surface non-unity build mode by passing ARGS=–no-unity to make; allows IWYU-type errors to be unmasked and fixed
Fixed the extra data in Directx textures, so we need to copy row by row on Windows to remove extra bytes on images
Fixed a bug in the TrafficManager causing vehicles that reached an ending lane to have abnormal behavior while lane changing
Collisions detected by the CollisionSensor no longer generate more than one event per frame
]]>@MattRoweEAIFCARLA Autonomous Driving Challenge 2023, online event and announcements2023-08-10T00:00:00+00:002023-08-10T00:00:00+00:00http://carla.org//2023/08/10/leaderboard-news
We at the CARLA organization are thrilled and inspired by the enthusiastic reception of the CARLA Autonomous Driving Challenge 2023!. This is an exciting opportunity for innovators to test their autonomous driving systems in new challenging situations.
Here’s what you need to know:
New Leaderboard 2.0 Platform: Taking the challenge to a new level, the competition now includes new regions, new routes, and a more extensive set of traffic scenarios. Get the details on our official website: https://leaderboard.carla.org/
Submit to Leaderboard 2.0 Tracks: We have developed new tools to ease the data acquisition process for the 2.0 routes. Time to step up the game and submit your solutions to these new tracks! More information on how to get started is available here: https://leaderboard.carla.org/get_started/.
Important Update: Leaderboard 1.0 will NOT accept new submissions during the 2023 challenge.
Event Announcement: The results of the CARLA Autonomous Driving Challenge 2023 will be revealed in an independent online event in early December, hosted by the Embodied AI Foundation and CARLA’s sponsors. As always, we will invite teams behind the top submissions to participate.
Please note that, unlike previous editions, the results won’t be presented at NeurIPS WS. For a summary of these exciting changes, don’t miss our new video instructions.
This year’s challenge promises to be bigger and bolder than ever! Get involved, innovate, and help shape the future of autonomous driving. Your adventure begins here!.
The CARLA organisation is delighted to announce today that Synkrotron has joined the CARLA consortium as a valued sponsor. Synkrotron’s CTO, Dr. Yuxi Pan, will join the CARLA consortium board to represent the company, alongside existing representatives from Intel, Toyota Research Institute, Futurewei and NVIDIA.
Synkrotron (formerly GuardStrike) offers powerful solutions for accelerating autonomous driving R&D. Their software products and solutions unify multiple aspects of the autonomous driving R&D pipeline, streamlining the collection, exchange and ingestion of data from real-world traffic scenarios, 3D assets, environments and maps into their world-class simulation platform, built on top of the CARLA simulator.
Synkrotron’s Oasis simulation platform enables the rapid creation of traffic scenarios through a user-friendly graphical scenario editor and an accompanying automated scenario generation toolbox. These functionalities help provide coverage for safety-critical scenarios with a minimum of work. To improve the fidelity of the simulation, the platform adds physically realistic and AI-based sensor models as well as data-driven traffic simulations. The entire platform can be scaled with concurrency through the cloud infrastructure.
Synkrotron deliver their solutions to OEMs and academic research laboratories worldwide, giving them a deep understanding of the industry’s simulation requirements. Their industry knowledge will serve as a considerable addition to the CARLA consortium, expertly guiding the CARLA roadmap as the industry evolves.
Dr. James Yang, founder and CEO of Synkrotron, states: “We believe a partnership between CARLA and Synkrotron will not only benefit CARLA’s user community but also the industry as a whole, serving customers who need technical support and customized simulation solutions. Besides adding new features that are open-sourced, our team is committed to provide valuable services and advanced features to augment CARLA’s functionality.”
Synkrotron have been a valued contributor to the CARLA ecosystem for several years, sponsoring the CARLA Leaderboard and making a significant code contribution to both the Leaderboard and CARLA repositories. Their addition to the consortium will be an ongoing benefit to the CARLA ecosystem.
We are pleased to welcome Synkrotron into the CARLA consortium and look forward to the future of the partnership!
]]>@MattRoweEAIFLet’s go off-road!2023-04-21T00:00:00+00:002023-04-21T00:00:00+00:00http://carla.org//2023/04/21/avl-off-road-simulation
CARLA is being widely used for the virtual testing of autonomous road vehicles with realistic
environment simulation. But have you ever tried to use it for off-road applications such as
agriculture, construction, or logistics?
AVL engineers have found a solution to enhance CARLA for simulation in unpaved, rough
terrain. This has been achieved by coupling CARLA with the advanced vehicle dynamics
software AVL VSMTM. With the AVL solution, the vehicle dynamics precisely interact with the
surface based on a synchronization of all wheel contact positions. In combination with AVL’s
soft-soil tire model, users can expect realistic driving behavior.
The two simulation tools are coupled using AVLs open co-simulation platform
Model.CONNECTTM. With plug & play interfaces it is easy to connect the signal I/O ports of the
tools with each other in a graphical user interface. The powerful co-simulation engine handles
the correct synchronization of all tools and can even handle tools running with different
frequencies.
In the concrete example of the autonomous tractor, the co-simulation setup was extended with
a sensor fusion algorithm that outputs a unified list of detected objects as well as the automated
driving control algorithm. The control loop is closed by updating the new vehicle position in
CARLA and generating new sensor data.
AVL agreed to contribute their CARLA code changes and technical documentation to the
CARLA project. Furthermore, AVL tools are available free of charge via the University
Partnership Program. Stay tuned and contact us if you are interested at info@avl.com.
The 0.9.14 release of CARLA has landed and we think you’ll be just as excited as we are about it!
At CARLA, we are scaling things up! The latest version of CARLA brings a brand new Large Map, with an unprecedented scale and level of detail. Town 12 is 10x10 km2 and boasts a diverse range of environments from urban high-rise to rural corn fields. You’ll be amazed by the size and detail!
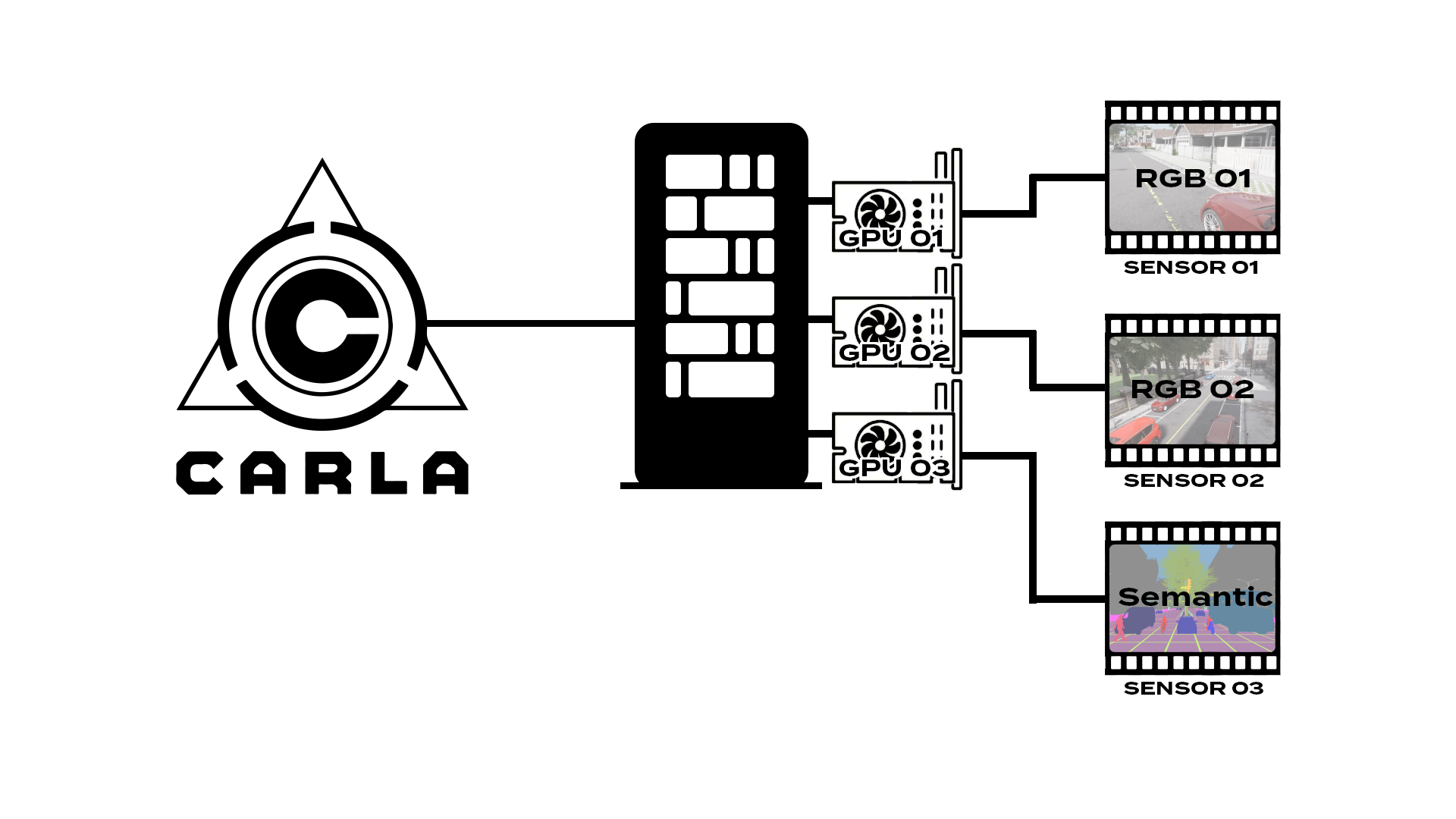
Continuing with the theme of scaling up, 0.9.14 now supports multiple GPUs for setting up high-performance CARLA workstations.
CARLA 0.9.14 brings further diversity and realism to your traffic simulations with a brand new public transit vehicle - the Mitsubishi Fuso Rosa bus.
This version of CARLA includes new semantic classes to further differentiate vehicle types. Buses, trucks, bicycles, motorcycles and riders now have their own semantic IDs and colors matching the Cityscapes color pallette.
N-wheeled vehicles are now supported by CARLA’s engine, enabling users to import models of heavy goods and industrial vehicles with 3 or more axles.
And last but not least, version 0.9.14 comes with numerous fixes and improvements. CARLA now has an Ackermann control built into the API, vehicle objects now have additional attributes to help filter and organise them and the Traffic Manager has new functions to offset the vehicle from the lane center.
We hope you enjoy reading about CARLA’s latest features!
Town 12
Town 12 is the newest addition to the CARLA asset library. Leveraging the Large Map functionality introduced in CARLA version 0.9.12, Town 12 boasts a diverse range of highly detailed environments including the following regions:
High-rise central business district:
Town 12’s central business district is a large area of high rise skyscrapers arranged into blocks on a consistent grid of roads, resembling downtown areas in many large American and European cities.
High density residential:
The high density residential areas of Town 12 have many 2-10 storey apartment buildings with commercial properties like cafes and retail stores at street level.
Low density residential:
The low density residential regions of Town 12 reflect the classic suburbs of many American cities, with one and two story homes surrounded by fenced gardens and garages.
Highways and intersections:
Town 12 has an extensive highway system, including 3-4 lane highways interspersed with impressive roundabout junctions.
Rural and farmland:
Town 12 also has rural regions with characteristic farmland buildings like wooden barns and farmhouses, windmills, grain silos, corn fields, hay bails and rural fencing.
Multi GPU
The CARLA simulator can now be distributed across multiple GPU devices. Multiple synchronized instances of the simulator can be run on different GPUs, with the sensor workload distributed evenly over the graphics cards. High performance CARLA workstations can be built using multi-GPU server hardware.
New Semantic Segmentation Classes
CARLA’s semantic classes are now fully compatible with the Cityscapes ontology. We have included 5 new classes for extra ground truth fidelity, assisting in the classification of different types of vehicle. The semantic class list now includes separate classes for cars, trucks and buses, along with new classes for motorcycles, bicycles and their riders.
The semantic class list has 5 new members and associated colors:
car (replaces the previous ‘vehicle’ class) - RGB: (0, 0, 142)
truck - RGB: (0, 0, 70)
bus - RGB: (0, 60, 100)
motorcycle - RGB: (0, 0, 230)
bicycle - RGB: (119, 11, 32)
rider - RGB: (255, 0, 0)
Mitsubishi Fuso Rosa bus
The CARLA garage presents a brand new public transit vehicle. The Mitsubishi Fuso Rosa is a widely used 20-25 seat bus, used by both private travel companies and public transport authorities around the world with tens of thousands produced every year.
N-wheeled Vehicles
CARLA now supports vehicles with more than four wheels. Users can now develop models of heavy goods and industrial vehicles with 3 or more axles and import them into CARLA.
New Camera Post Processing Effects
CARLA camera sensors can now simulate the distorting effects of rain and dust contamination of the lens, adding an extra level of realism to your training data and presenting challenges for testing your AD stacks with imperfect data.
Improvements and fixes
As with every CARLA release, we continue our efforts to improve the workflow and fix bugs. The following are some key improvements and fixes:
New vehicle attributes:
Vehicle blueprints now have new attributes to help organize and filter them better:
base_type: can be use as a vehicle classification. The possible values are car, truck, van, motorcycle and bicycle.
special_type: provides more information about the vehicle. It is currently restricted to electric, emergency and taxi, and not all vehicles have this attribute filled.
has_dynamic_doors: can either be true or false depending on whether or not the vehicle has doors that can be opened using the API.
has_lights: works in the same way as has_dynamic_doors, but differentiates between vehicles with lights, and those that don’t.
Native Ackermann controller:
The CARLA API now has methods for applying Ackermann controls to a vehicle:
apply_ackermann_control: to apply an Ackermann control command to a vehicle
get_ackermann_controller_settings: to get the last Ackermann controller settings applied
apply_ackermann_controller_settings: to apply new Ackermann controller settings
New Traffic Manager methods:
The Traffic Manager has new methods to offset the vehicle from the lane center:
vehicle_lane_offset(actor, offset)
global_lane_offset(offset)
Other fixes and improvements:
Fixed bug in FrictionTrigger causing sometimes server segfault
Added attachment type “SpringArmGhost” for cinematic cameras but without doing the collision test.
Improved algorithm to move signals out of the road by computing the desired displacement direction.
Some of the warnings shown when building a map will now only be showing when debugging.
The ids for semantic segmentation has been modified to be the same as cityscapes (labels, ids and colors)
Fixed bug causing traffic signals at the end points of a road to sometimes create malformed waypoints.
Fixed pedestrian skeleton frame, where sometimes it was draw displaced from the body
Fixed decals when importing maps. It was using other .json files found in other packages.
In multi-GPU mode some sensors now are forced to be created on the primary server always (ex. collision sensor)
Added the speed limits for 100, 110 and 120 Km/h.
Fixing sensor destruction, now the stream and socket is succesfully destroyed.
Fixed bug at Vehicle.get_traffic_light_state() and Vehicle.is_at_traffic_light() causing vehicles to temporarily not lose the information of a traffic light if they moved away from it before it turned green.
Changed the height of the automatic spawn points, from 3m to only 0.5m
Added pedestrian skeleton to the recorder, as additional data. They will replay with the exact pose.
Added multi-GPU feature. Now several servers (with dedicated GPU) can render sensors for the same simulation.
Fixed bug causing the Vehicle.get_traffic_light_state() function not notify about the green to yellow and yellow to red light state changes.
Fixed bug causing the Vehicle.is_at_traffic_light() function to return false if the traffic light was green.
Fixed bug causing the scene lights to return an incorrect location at large maps.
Fixed bug causing the world.ground_projection() function to return an incorrect location at large maps.
Added failure state to vehicles, which can be retrieved by using Vehicle.get_failure_state(). Only Rollover failure state is currently supported.
Fixed bug causing the TM to block the simulation when a vehicle with no physics was teleported.
Fixed bug causing the TM to block the simulation when travelling through a short roads that looped on themselves.
Improved the TM’s handling of non signalized junctions, resulting in a more fluid overall behavior.
Added check to avoid adding procedural trigger boxes inside intersections.
Python agents now accept a carla.Map and GlobalRoutePlanner instances as inputs, avoiding the need to recompute them.
Python agents now have a function to lane change.
Python agents now detect vehicle in adjacent lanes if invaded due to the offset.
Fixed bug causing the python agents to sometimes not detect a blocking actor if there were severral actors around it.
Improved Python agents performance for large maps.
Fix a bug at Map.get_topology(), causing lanes with no successors to not be part of it.
Added new ConstantVelocityAgent
Added new parameter to the TrafficManager, set_desired_speed, to set a vehicle’s speed.
Fixed bug causing the Traffic Manager to not be deterministic when using hybrid mode
Added NormalsSensor, a new sensor with normals information
Added support for N wheeled vehicles
Added support for new batch commands ConsoleCommand, ApplyLocation (to actor), SetTrafficLightState
Added new API function: set_day_night_cycle at the LightManager, to (de)activate the automatic switch of the lights when the simulation changes from day to night mode, and viceversa.
Switch to boost::variant2 for rpc::Command as that allows more than 20 RPC commands
Added post process effects for rainy and dusty weathers.
Switched data type of the dust storm weather parameter from bool to float.
Check for the version of the installed Clang compiler during build.
Added API function to get direct access to the GBuffer textures of a sensor:
listen_to_gbuffer: to set a callback for a specific GBuffer texture
]]>@MattRowe18Guardstrike has released the CARLA-Apollo Bridge2022-11-28T00:00:00+00:002022-11-28T00:00:00+00:00http://carla.org//2022/11/28/carla-apollo-bridge
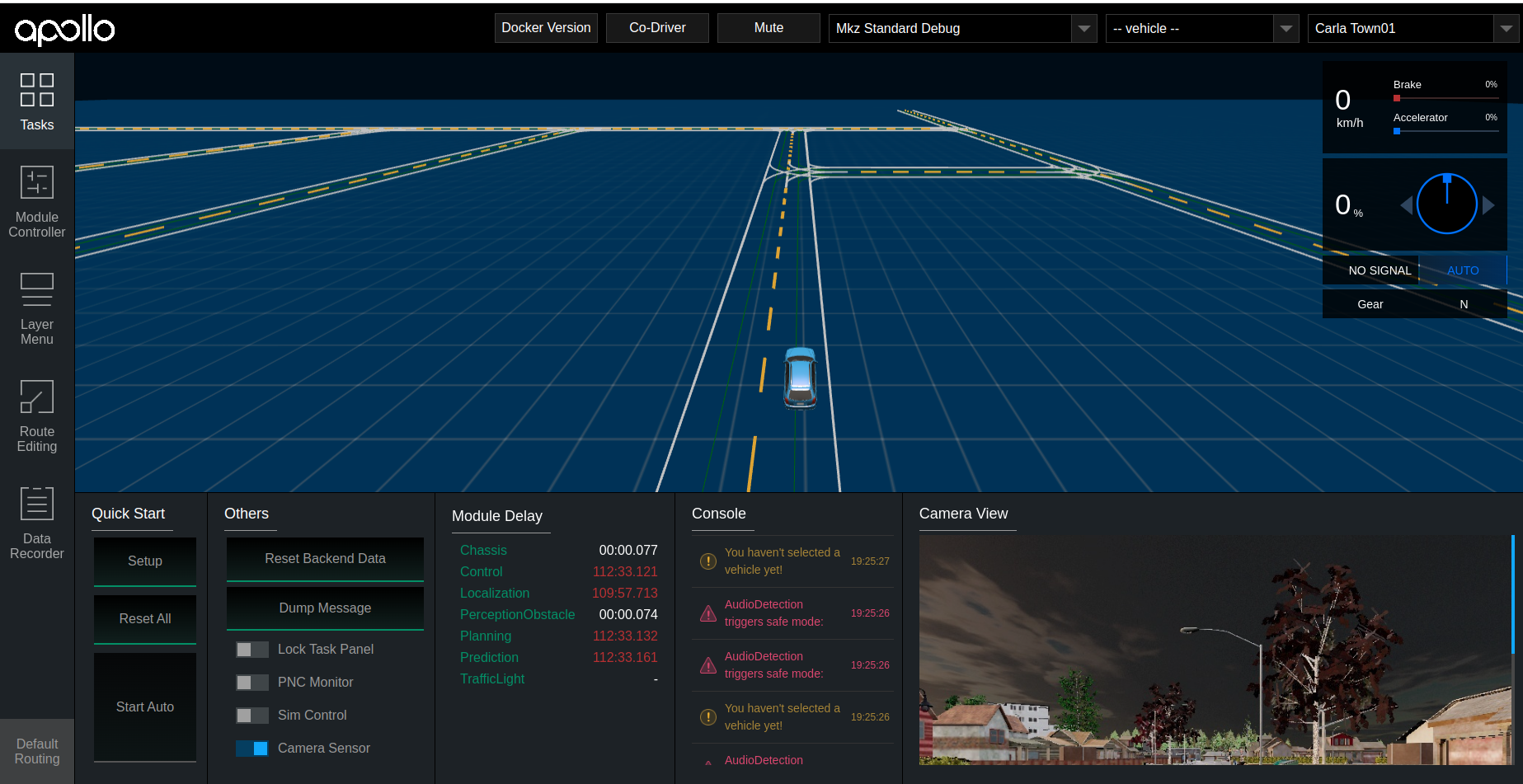
The CARLA team is delighted to announce that our Leaderboard partners, Guardstrike, have released the CARLA-Apollo bridge.
Apollo is an open-source L4 autonomous driving software stack used by many OEMs, solution vendors, developers and researchers. The CARLA-Apollo bridge connects the two popular open-source software packages, enabling Apollo software stacks to drive the CARLA simulator and receive, assimilate, interpret and visualize data through the extensively featured Apollo interface.
This promises great new potential for both user communities, connecting a high performance, flexible platform for accelerating development and testing of AD software stacks with the industry’s most widely used open-source simulator.