We are pleased to present to you the latest version of CARLA, version 0.9.15! This version brings SimReady content import to CARLA through NVIDIA’s Omniverse platform, 2 new maps, a procedural map generation tool and a procedural building generation tool to accelerate and enhance your CARLA content creation process.
CARLA is now integrated with NVIDIA’s Omniverse content creation platform to support SimReady content import into CARLA with just a few clicks. CARLA users can now import assets directly into CARLA through the NVIDIA Omniverse Unreal Engine plugin.
0.9.15 introduces two new maps: Town 13, a new Large Map of 10x10 km2 and Town 15, a new map based on the campus of the Universitat Autònoma de Barcelona (UAB). Town 13 shares its scale and some of its features with Town 12. However, the styles of many of its details such as road surfaces, buildings and vegetation are very distinct from those of Town 12. Therefore Town 13 serves as an ideal companion to Town 12, completing a powerful train-validation pair to expose overfitting issues! Town 15 sports a campus-like road layout, with plentiful mini-roundabouts and traffic calming measures, along with minimalist modern buildings like those seen in many European universities.
This release introduces some incredible new procedural map generation tools to accelerate your environment generation workflow. The Digital Twin Tool enables a 3D map to be procedurally generated from a digital representation of real-world road networks derived from OpenStreetMap data, fully populated with roads, buildings and vegetation. The procedural building tool can be used for creating 3D models based on a selection of fascia building blocks and tweekable parameters, to create infinite variations on building styles.
A new heavy goods vehicle is now included to add diversity to CARLA’s vehicle library. The vehicle is the tractor part of an HGV in the cab-over-engine style seen primarily on European roads.
CARLA’s asset library now has a catalogue to help you find the assets you require for your simulation. Browse blueprints with pictures and choose your props and vehicles with ease!
We hope you enjoy using CARLA’s latest features!
SimReady content from NVIDIA’s Omniverse platform
NVIDIA’s SimReady specification supports the preparation of 3D content that is purpose-built for simulation to help streamline content creation pipelines used in simulating 3D virtual environments for machine learning purposes in robotics and autonomous driving. Through the Omniverse Unreal Engine plugin, now integrated into CARLA, users can import, in just a few clicks, SimReady content such as vehicles already configured with working lights, doors and wheels and props ready for use instantaneously to decorate CARLA maps. CARLA’s Omniverse integration boasts to significantly accelerate your 3D environment building pipeline and opens the door to a whole world of applications in the Omniverse ecosystem.
Town 13
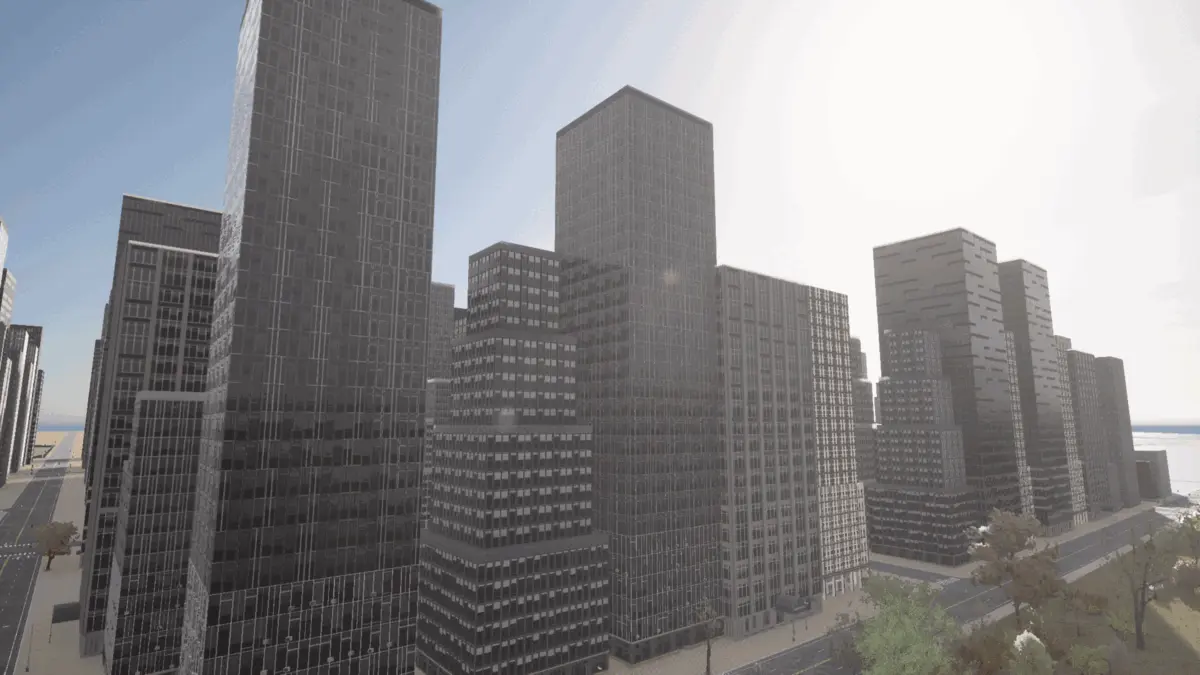
Town 13 shares many similarities with Town 12. It is 100 square kilometers in size and has an extensive road network, a high-rise downtown area, residential and rural areas, vegetation and water features. However, Town 13’s road network has some unique details that differ from those of Town 12. To add to this, the architectural styles of each area of the city are quite distinct from the corresponding areas of Town 12. Town 13 is also decorated with new styles of vegetation and foliage. This makes Town 13 an ideal companion to Town 12 as part of a train-validation pair. Deriving training data using one of the pair and then running validation in the other is a powerful method for exposing overfitting issues in your AD stack.
Town 15
Town 15 is a standard map based on the road layout and some emblematic buildings from the Universitat Autònoma de Barcelona (UAB) campus. The road layout includes many roundabouts and roadside parking spots and also has some areas of steep elevation. The map also features numerous minimalist, modern buildings styled after those of the campus of the Universitat Autònoma de Barcelona, including the Computer Vision Center and the humanities library. This is an ideal map to train and test in environments similar to campuses or industrial estates, with slow moving traffic and traffic calming measures.

Procedural Map Generation Tools
CARLA 0.9.15 introduces two new experimental features for procedural generation of new maps and buildings. These tools will help to accelerate map generation and add diversity to custom built CARLA maps.
Digital Twin Tool
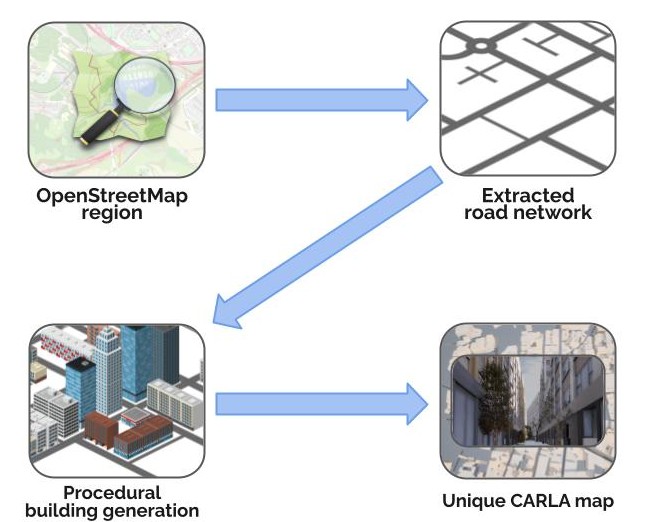
The digital twin tool generates unique CARLA maps based on areas of road network derived from OpenStreetMap data. Users can download an area of OSM data as input for the tool and browse the map using the tool’s interface. When an area of interest is chosen, the tool will extract the roads then decorate them with realistic road surfaces, generating 3D buildings and vegetation to fill the spaces between the roads. The result is a unique CARLA map with a road network representing a digital twin of a real-world road network. The buildings are generated matching the footprint and height data extracted from OSM, so the buildings in the digital twin proportionally match the real buildings in the chosen map region. Buildings are clad with mesh pieces in a variety of styles drawn from the CARLA asset library to create visual diversity.

Procedural building tool
The procedural building tool gives CARLA users the capability to create new buildings based on a library of building block mesh pieces and parameters to control the dimensions and features of the building.
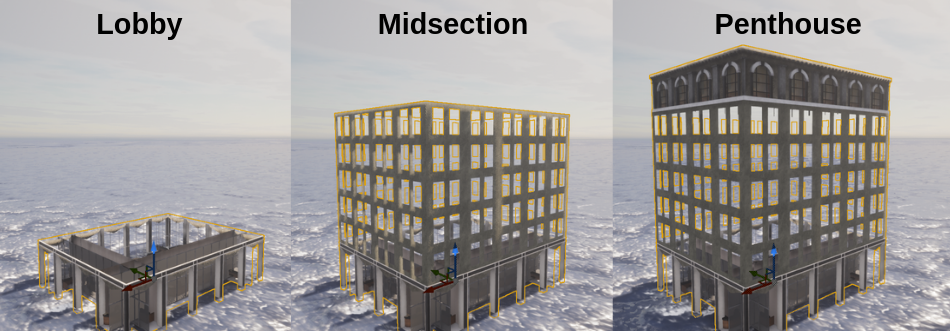
Various decorations can be added to the buildings such as window boxes, lintels, windowsills, guttering, sun shades, blinds and antennas to create subtle or large variations.

New vehicle: Heavy Goods Vehicle
CARLA’s array of vehicles for simulation has grown with the addition of a Cab-Over-Engine style heavy goods vehicle tractor, of the style commonly used throughout Europe for commercial transportation.

CARLA catalogue
CARLA’s principal assets - maps, vehicles, pedestrians and props now have a catalogue to help find the item that best suits your needs. Browse visually through maps, vehicles or props to find the assets you want to use in your simulation and copy the Blueprint ID right out of the catalogue. Check the CARLA catalogue out here. The catalogue also includes useful navigator tools for Towns 12 and 13, which can help you make your way around these two Large Maps with ease.
Other fixes and improvements:
- New API function to load map only if it is not the current map
- Added empty actor blueprint
- Pedestrians with AI or in replayer are now faster around 10x. They have collisions disabled until they hit a vehicle
- Fixed bug causing the
FPixelReader::SavePixelsToDisk(PixelData, FilePath)function to crash due to pixel array not set correctly - Fixed the import script, where could use any other TilesInfo.txt if the destination folder has many
- Fixed sensors to check for the stream to be ready (race condition)
- Added keyword arguments for
carla.TrafficManagerPython API functions - Surface non-unity build mode by passing ARGS=–no-unity to make; allows IWYU-type errors to be unmasked and fixed
- Fixed the extra data in Directx textures, so we need to copy row by row on Windows to remove extra bytes on images
- Fixed a bug in the TrafficManager causing vehicles that reached an ending lane to have abnormal behavior while lane changing
- Collisions detected by the CollisionSensor no longer generate more than one event per frame